mnultitool.matrix package¶
Submodules¶
mnultitool.matrix.classification module¶
Functions:
Checks if matrix is strictly diagonally dominated |
|
Checks if a square matrix is symmetric |
-
mnultitool.matrix.classification.isMatrixDiagDominant(A)¶ Checks if matrix is strictly diagonally dominated
- Parameters
A (
ndarray) – the matrix to be checked- Raises
ValueError – If the supplied np.ndarray does not have exactly 2 dimensions or it is not square
- Return type
bool- Returns
whether the matrix is strictly diagonally dominated
-
mnultitool.matrix.classification.isMatrixSymmetric(A)¶ Checks if a square matrix is symmetric
- Parameters
A (
ndarray) – the matrix to be checked- Raises
ValueError – If the supplied np.ndarray does not have exactly 2 dimensions or it is not square
- Return type
bool- Returns
whether the matrix is symmetric
mnultitool.matrix.matrix module¶
Functions:
|
Transforms an equation system using LU decomposition and solves the equation system using Jacobi’s method |
Transforms an equation system using the least squares method according to the formula: |
|
|
Transforms an equation system using QR decomposition and solves the equation system using sp.linalg.solve_triangular |
|
Transforms an equation system with a rectangular matrix of coefficients, to an equation system with a square matrix Note: both the matrix & the vector returned will be different from the inputs |
|
Transforms an equation system using SVD decomposition and solves the equation system using sp.linalg.solve |
|
Generates a Frobenius matrix for a given list of polynomial coefficients, ordered from the one next to the highest power of x, to the one next to the lowest (that is, just a scalar) |
|
Generates an SVD decomposition of matrix A & reconstructs the matrix using these components and supplied singular values of matrix A |
-
mnultitool.matrix.matrix.eqSysLUAndSolveJacobi(A, b, x_init, epsilon=1e-08, maxiter=100, checkNecessaryCondition=False)¶ Transforms an equation system using LU decomposition and solves the equation system using Jacobi’s method
- Parameters
A (
ndarray) – a square coefficients matrix A of shape (m, m)b (
ndarray) – vector of right hand side coefficients b of shape (m, 1)x_init (
ndarray) – initial solution of shape (m, 1)epsilon (
float) – the desired solution precisionmaxiter (
int) – a maximum iterations limit (to prevent an infinite loop), a positive integer
- Raises
ValueError – If either input is of invalid type, matrix A does not have exactly 2 dimensions, vector b is of invalid shape, b’s first dimension does not match A’s, matrix A is not square, x_init has an invalid shape, epsilon or maxiter are not positive integers, or matrix A is not strictly diagonally dominant (in such a case Jacobi’s method would not converge)
- Return type
ndarray,int]- Returns
a tuple containing (in order): eq sys solution x of shape (m, 1), L, U, iter, where L & U are LU decomposition components and iter is the number of iterations passed
-
mnultitool.matrix.matrix.eqSysLeastSquaresAndSolve(A, b)¶ Transforms an equation system using the least squares method according to the formula:

and solves the equation system using sp.linalg.solve
- Parameters
A (
ndarray) – a square coefficients matrix A of shape (m, m)b (
ndarray) – vector of right hand side coefficients b of shape (m, 1)
- Return type
ndarray,ndarray,ndarray]- Returns
a tuple containing (in order): vector of eq sys solutions x, transformed matrix A^T A, transformed vector A^T b
-
mnultitool.matrix.matrix.eqSysQRAndSolve(A, b)¶ Transforms an equation system using QR decomposition and solves the equation system using sp.linalg.solve_triangular
- Parameters
A (
ndarray) – a square coefficients matrix A of shape (m, m)b (
ndarray) – vector of right hand side coefficients b of shape (m, 1)
- Return type
ndarray,ndarray,ndarray]- Returns
a tuple containing (in order): vector of eq sys solutions x, Q, R where Q & R are QR decomposition components
-
mnultitool.matrix.matrix.eqSysRectToSquare(A, b)¶ Transforms an equation system with a rectangular matrix of coefficients, to an equation system with a square matrix Note: both the matrix & the vector returned will be different from the inputs
- Parameters
A (
ndarray) – the rectangular coefficients matrix of shape (m, n)b (
ndarray) – vector b of shape (m, 1), containg the right hand side coefficients
- Raises
ValueError – When inputs’ types are incorrect or either shape is invalid
- Return type
ndarray,ndarray]- Returns
tuple containing a square matrix of shape size (n, n) & a modified vector b of shape (n, 1)
-
mnultitool.matrix.matrix.eqSysSVDAndSolve(A, b)¶ Transforms an equation system using SVD decomposition and solves the equation system using sp.linalg.solve
- Parameters
A (
ndarray) – a square coefficients matrix A of shape (m, m)b (
ndarray) – vector of right hand side coefficients b of shape (m, 1)
- Return type
ndarray,ndarray,ndarray,ndarray]- Returns
a tuple containing (in order): vector of eq sys solutions x, U, S, V where U, S & V are SVD decomposition components
-
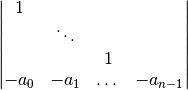
mnultitool.matrix.matrix.frobeniusFromPolyCoeffs(coeffs)¶ Generates a Frobenius matrix for a given list of polynomial coefficients, ordered from the one next to the highest power of x, to the one next to the lowest (that is, just a scalar)
For example: w(x) = 5x^3 + 4x - 3 => coeffs = [5, 0, 4, -3]
- Raises
ValueError – when the input is not a list, or the first coefficient is equal to 0 (and cannot be a divisor then)
- Return type
ndarray- Returns
the Frobenius array corresponding to the polynomial with given coefficients
-
mnultitool.matrix.matrix.svdAndReconstruction(A, singularValues)¶ Generates an SVD decomposition of matrix A & reconstructs the matrix using these components and supplied singular values of matrix A
- Parameters
A (
ndarray) – matrix A of shape (m, m)singularValues (
ndarray) – singular values vector of shape (m, 1)
- Raises
ValueError – When inputs’ types are incorrect or either shape is invalid
- Return type
ndarray,ndarray,ndarray,ndarray]- Returns
(U, S, V, M), where U, S & V are SVD decomposition components & M is the reconstruction of A